
フォロ君の動作を指定するピンを再掲します。
P13 :足のモーターの制御(前進)
P14 :足のモーターの制御(後退)
P15 :腰のモーターの制御(反時計回り)
P16 :腰のモーターの制御(時計回り)
これらのプログラムを以下で作ります。
斜めへ歩かせる場合は、進むべき方向に頭を向け、進んでください。
※回転方向は、フォロの頭上から見おろした時の向きです。
矛盾した指令は与えないようにしてください。
念のために使わない命令のピンは「0」を出力することをお勧めします。

【前進】
A ボタンが押されたら
2秒間前進(モーター正転)

【後退】
B ボタンが押されたら
2秒間後退(モーター逆転)
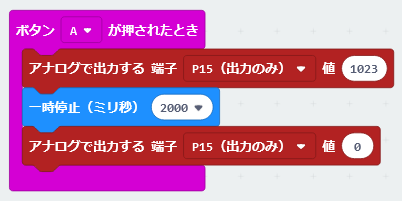
【反時計回り】
A ボタンが押されたら
2秒間 反時計回り(モーター正転)

【時計回り】
B ボタンが押されたら
2秒間 時計回り(モーター逆転)